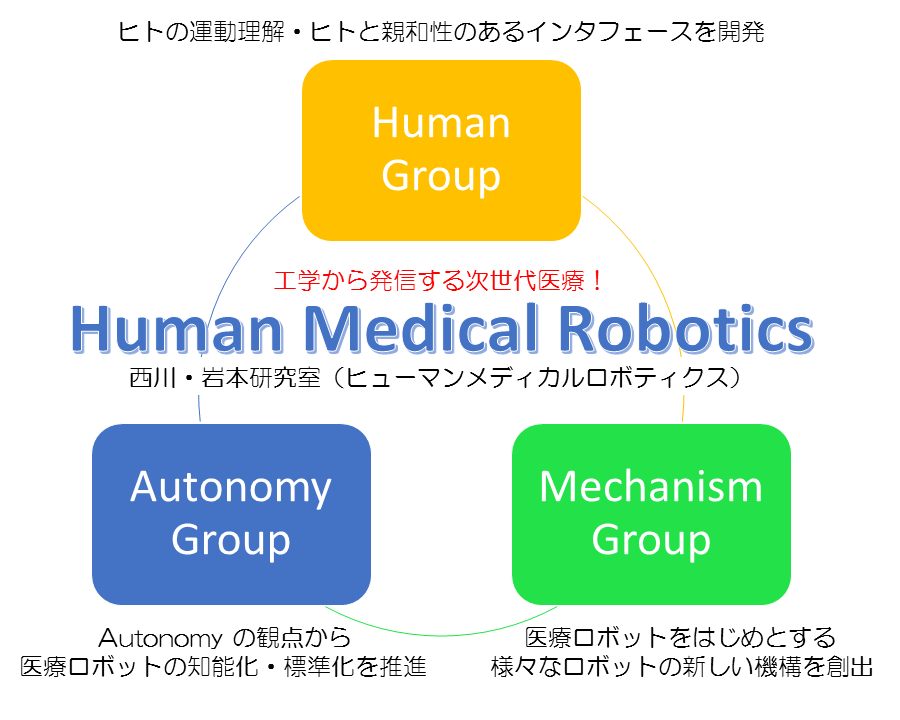
■【参考】2017.4.1時点での研究グループ構成図
「ロボットが手術タスクを代行する日は来るか」 と題した西川教授の3分プレゼン動画です。 このYouTube動画を含め30分講義動画や1分メッセージなど さらに詳しい研究紹介は こちら